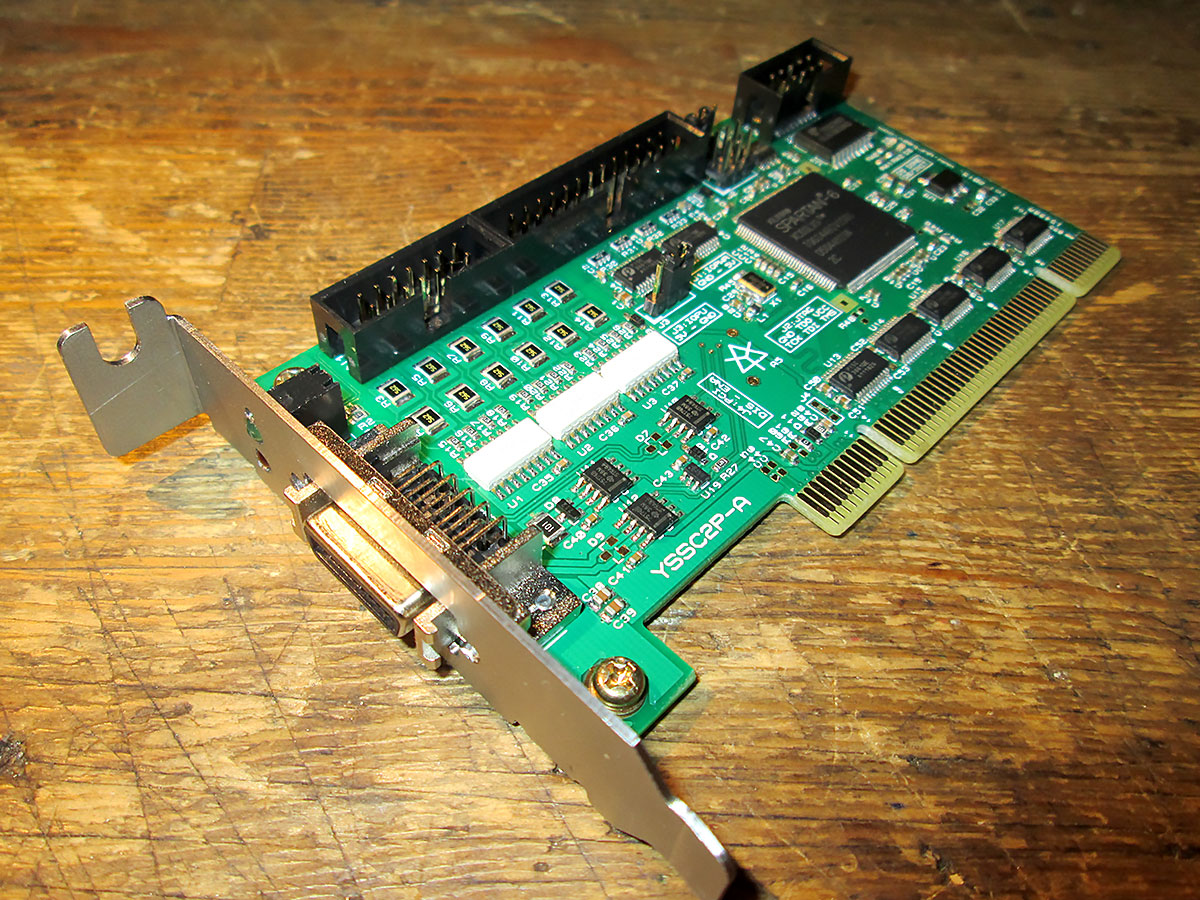
The machine uses YSSC3P interface card to Mitsubishi MR-J3-B servo drives, HF-KP motors, fully-closed loop control with Renishaw RGH24 linear encoder on the belt-driven axis. Stepper motor drivers are also fed with a pulse train by the custom FPGA firware from YSSC3P. USB cams video processed with OpenCV. Everything works under LinuxCNC control.

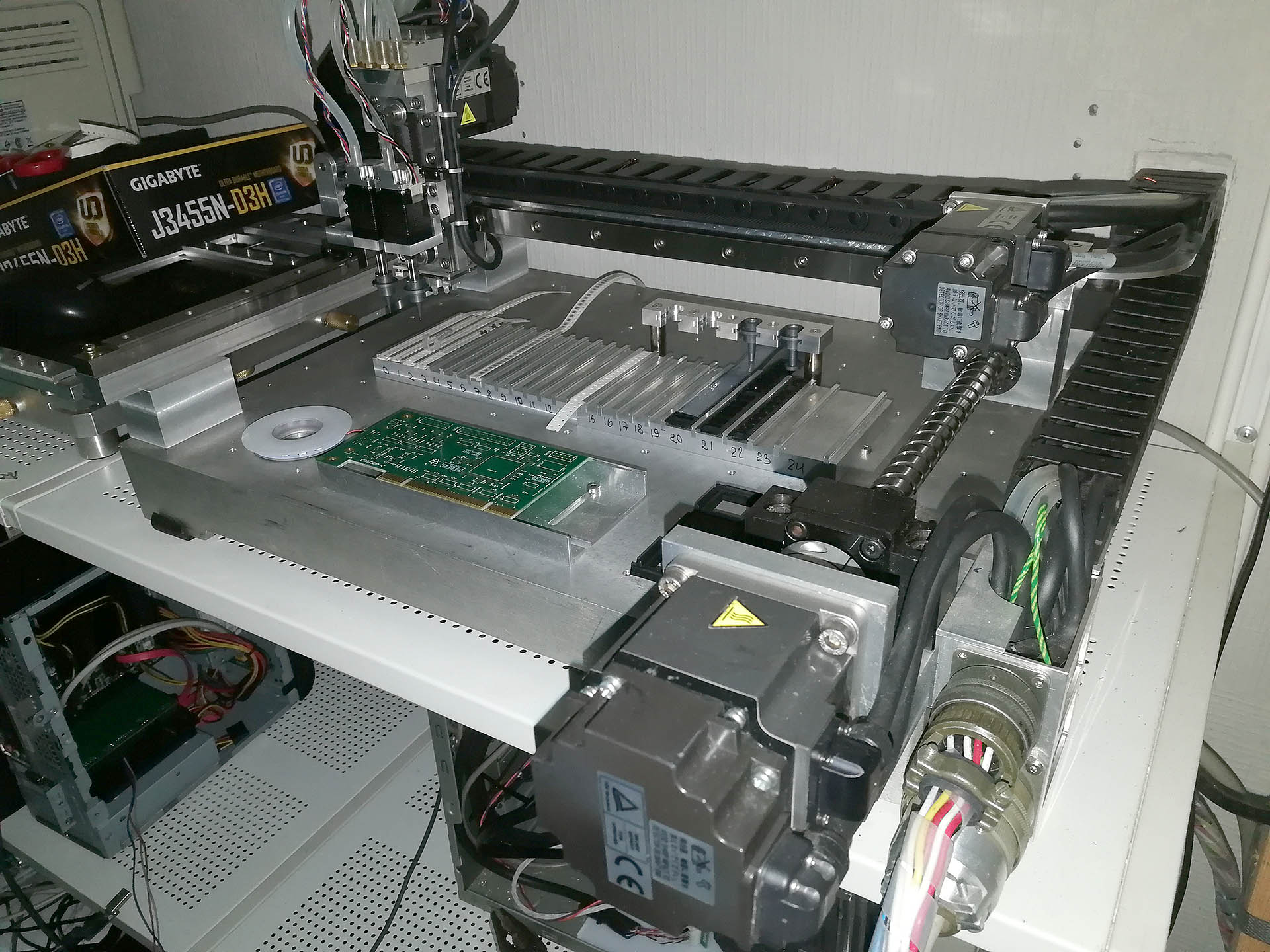
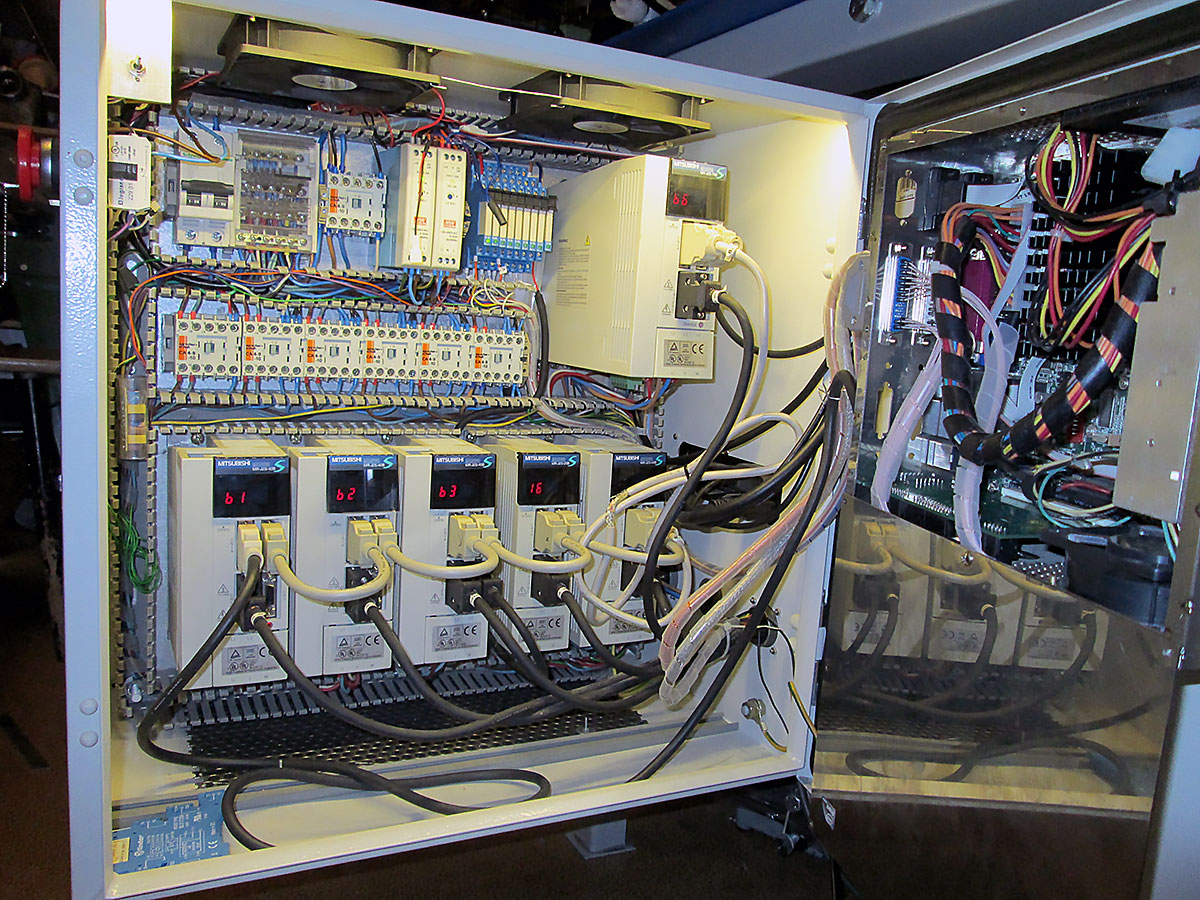
A small chineese benchtop milling machine retrofitted with ballscrews and 3 HC-MFS43/KFS43 servo motors. The spindle motor is HC-KFS73. The control box contains 4 MR-J2S-40B, 1 MR-J2S-20B and a MR-J2S-70B servo amplifiers. LinuxCNC runs on a intel Atom D2700 mini-ITX motherboard. Rotary axis is made from a surplus 1:50 Harmonic Drive reducer off a Yaskawa robot driven by HF-KP43 servo motor. A few photos and videos of the machine in action:


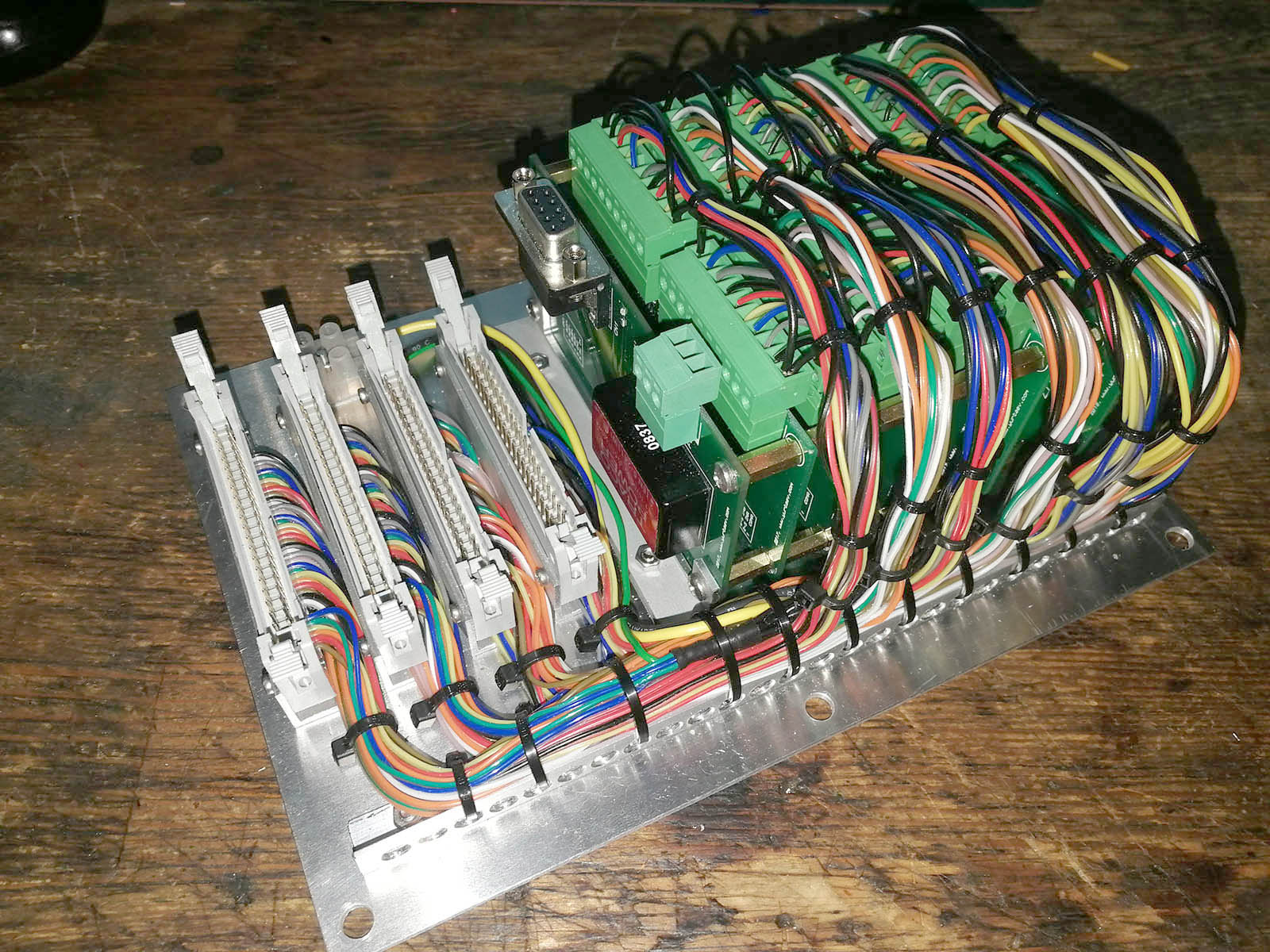
Example of YIO modules wired for drop-in replacement of MELDAS HR337 card with 64 inputs and 48 outputs: